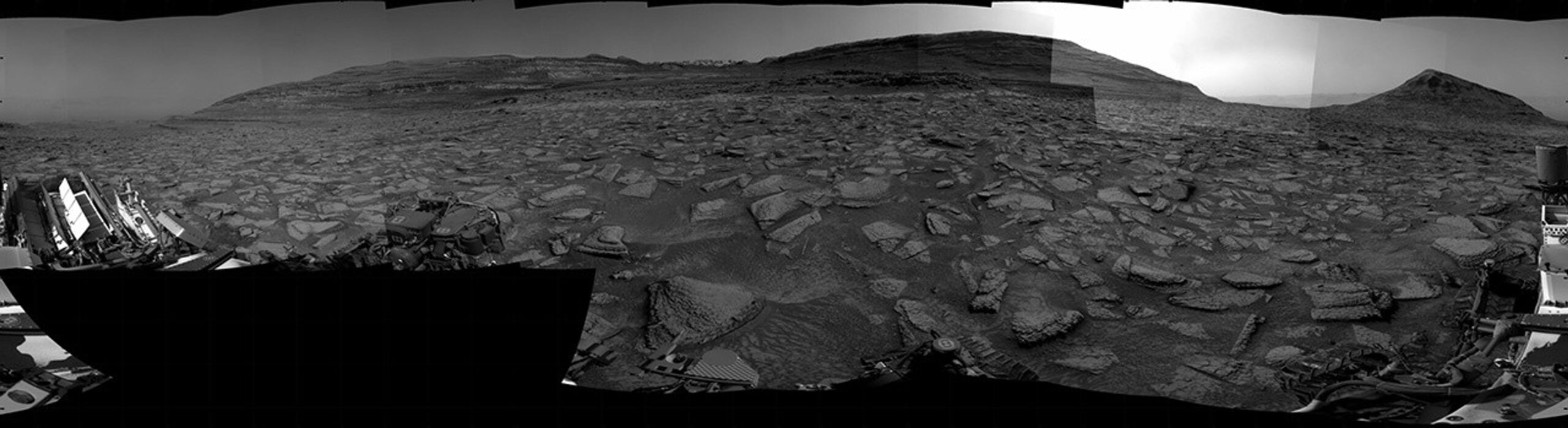
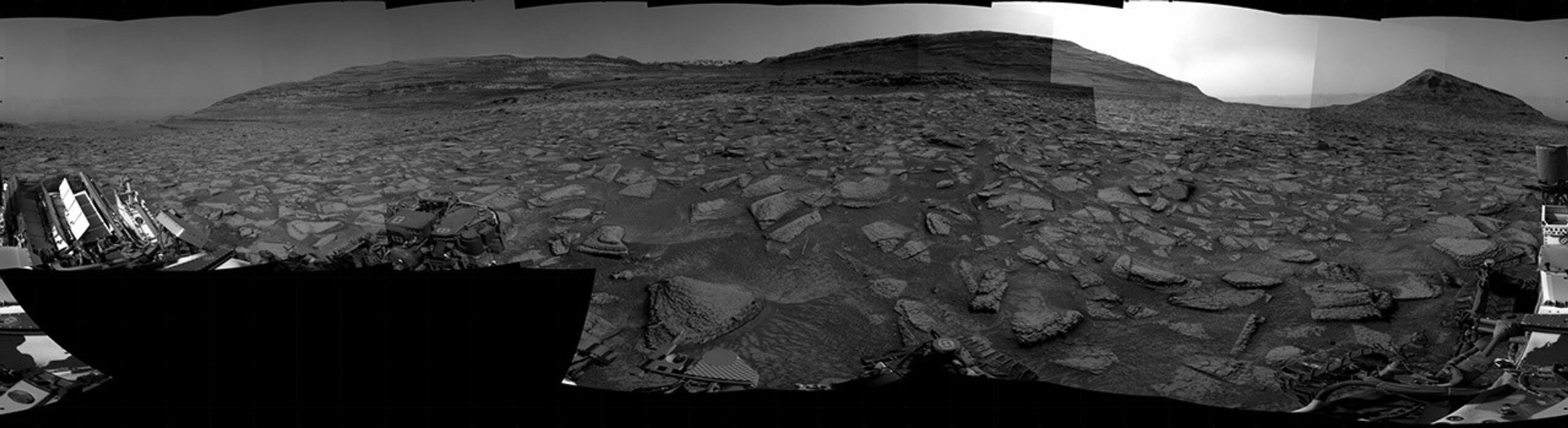
NASA’s Mars rover Curiosity poslal z Gale Crater nový pohľad na povrch Marsu: zo 31 záberov vytvoril seam-corrected mozaiku v 360-stupňovej cylindrickej projekcii. Snímky vznikli pomocou mast-mounted Right Navigation Camera, teda Navcam, a panoráma je orientovaná na 162 stupňov azimutu, meraných v smere hodinových ručičiek od severu.
Snímka zobrazuje: Sol 4893: Right Navigation Camera, Cylindrical Projection.
Podľa zdroja Curiosity snímky získal 13. mája 2026, na Sol 4893 misie Mars Science Laboratory, počas jazdy označenej ako drive 462 na site number 122. Expozície prebiehali v lokálnom strednom slnečnom čase medzi 15:00 a 16:00. Každý záber Navcam má zorné pole 45 stupňov, čo pomáha vysvetliť, prečo je na vytvorenie jedného plynulého panoramatického obrazu potrebný celý rad prekrývajúcich sa fotografií.
Takéto snímky nie sú len vizuálne atraktívne. Pre tím, ktorý rover riadi a interpretuje jeho dáta, sú dôležité ako prehľad okolia, pomáhajú posúdiť terén a vybrať ďalší smer pohybu aj miesto na detailnejšie pozorovanie. V prípade Marsu pritom každý nový panoramatický záber dopĺňa dlhodobý obraz o tom, ako vyzerá povrch v konkrétnej lokalite a v konkrétnom čase.
Čo presne ukazuje táto panoráma
Mozaika vznikla z 31 jednotlivých obrazov nasnímaných palubnou navigačnou kamerou na stožiari roveru. Cylindrická projekcia umožňuje rozvinúť zábery tak, aby vytvorili takmer súvislý pás okolo vozidla. Je to praktický spôsob, ako zobraziť široký priestor bez straty orientácie v smere pohľadu.
Snímka zobrazuje: A grayscale panorama of the Martian surface, possibly at night or in twilight, shows a wide field of flat, dark gray terrain dotted with multiple.
Seam-corrected znamená, že spojenia medzi jednotlivými snímkami boli upravené tak, aby prechody nepôsobili rušivo. Ide o štandardný typ spracovania pri panorámach, najmä keď sa snímajú z viacerých uhlov a za mierne odlišných podmienok osvetlenia.
Prečo je Navcam pre rover dôležitá
Navigačné kamery na roveroch plnia predovšetkým praktickú úlohu. Pomáhajú rozpoznať prekážky, odhadnúť sklon terénu a získať prehľad o okolitých skalách či piesku. V praxi ide o jeden z nástrojov, vďaka ktorým môže Curiosity bezpečnejšie plánovať pohyb po marťanskom povrchu.
Každý záber má podľa zdroja 45-stupňové zorné pole, čo je užitočné pre zachytenie širšieho výseku okolitého terénu. Na zostavenie panorámy sa potom jednotlivé polia prekryjú a zlepia do jedného celku. Pre čitateľa to znamená, že výsledný obraz je nielen estetický, ale aj technicky významný dokument o prostredí, v ktorom rover pracuje.
Gale Crater ako dlhodobé pracovisko
Curiosity pôsobí v Gale Crater už roky a práve tam sa opakovane zhromažďujú údaje, ktoré pomáhajú skladať geologický príbeh lokality. NASA v zdroji neuvádza detailný opis terénu v okolí tejto konkrétnej snímky, no všeobecne platí, že podobné panorámy umožňujú porovnávať aktuálny stav povrchu s predchádzajúcimi pozorovaniami.
Pre planetárny výskum je dôležité aj to, že vizuálne dáta sa dajú prepájať s inými meraniami roveru. Aj keď samotná panoráma nemusí priniesť veľký nový objav, môže poskytnúť kontext pre ďalšie analýzy a rozhodovanie o tom, kam sa má prieskum uberať.
Prečo na takýchto snímkach záleží aj mimo misie
Verejné zverejňovanie panorám z Marsu má vedeckú aj komunikačnú hodnotu. Laickému publiku približuje prostredie, v ktorom sa rover pohybuje, a zároveň ukazuje, ako funguje robotický výskum planéty, ktorá je od Zeme vzdialená milióny kilometrov. Pre odborníkov sú zase takéto zábery súčasťou pracovného prostredia, z ktorého sa vychádza pri plánovaní ďalších krokov.
V širšom kontexte je to dobrá pripomienka, že výskum Marsu nestojí len na spektakulárnych objavoch. Opiera sa aj o rutinné, presné a opakovateľné pozorovania, ktoré pomaly budujú spoľahlivý obraz o planéte.
Čo zostáva otvorené a čo bude nasledovať
Zdroj neuvádza, aký konkrétny vedecký záver si tím z tejto panorámy odnáša. Zverejnené informácie hovoria najmä o dátume, lokalite, spôsobe snímania a technických parametroch obrazu. To je pri takýchto položkách bežné: nie každý nový záber je správa o zásadnom objave.
Aj preto sa význam podobných snímok často ukáže až v spojení s ďalšími dátami. General context: roverové panorámy sa používajú priebežne, aby sa podporilo plánovanie presunov, výber cieľov a porovnanie zmien v prostredí v čase. Presne tento druh postupného, kumulatívneho poznávania patrí k jadru marsovského výskumu.
Na poskytovanie tých najlepších skúseností používame technológie, ako sú súbory cookie na ukladanie a/alebo prístup k informáciám o zariadení. Súhlas s týmito technológiami nám umožní spracovávať údaje, ako je správanie pri prehliadaní alebo jedinečné ID na tejto stránke. Nesúhlas alebo odvolanie súhlasu môže nepriaznivo ovplyvniť určité vlastnosti a funkcie.
Funkčné
Vždy aktívny
Technické uloženie alebo prístup sú nevyhnutne potrebné na legitímny účel umožnenia použitia konkrétnej služby, ktorú si účastník alebo používateľ výslovne vyžiadal, alebo na jediný účel vykonania prenosu komunikácie cez elektronickú komunikačnú sieť.
Predvoľby
Technické uloženie alebo prístup je potrebný na legitímny účel ukladania preferencií, ktoré si účastník alebo používateľ nepožaduje.
Štatistiky
Technické úložisko alebo prístup, ktorý sa používa výlučne na štatistické účely.Technické úložisko alebo prístup, ktorý sa používa výlučne na anonymné štatistické účely. Bez predvolania, dobrovoľného plnenia zo strany vášho poskytovateľa internetových služieb alebo dodatočných záznamov od tretej strany, informácie uložené alebo získané len na tento účel sa zvyčajne nedajú použiť na vašu identifikáciu.
Marketing
Technické úložisko alebo prístup sú potrebné na vytvorenie používateľských profilov na odosielanie reklamy alebo sledovanie používateľa na webovej stránke alebo na viacerých webových stránkach na podobné marketingové účely.