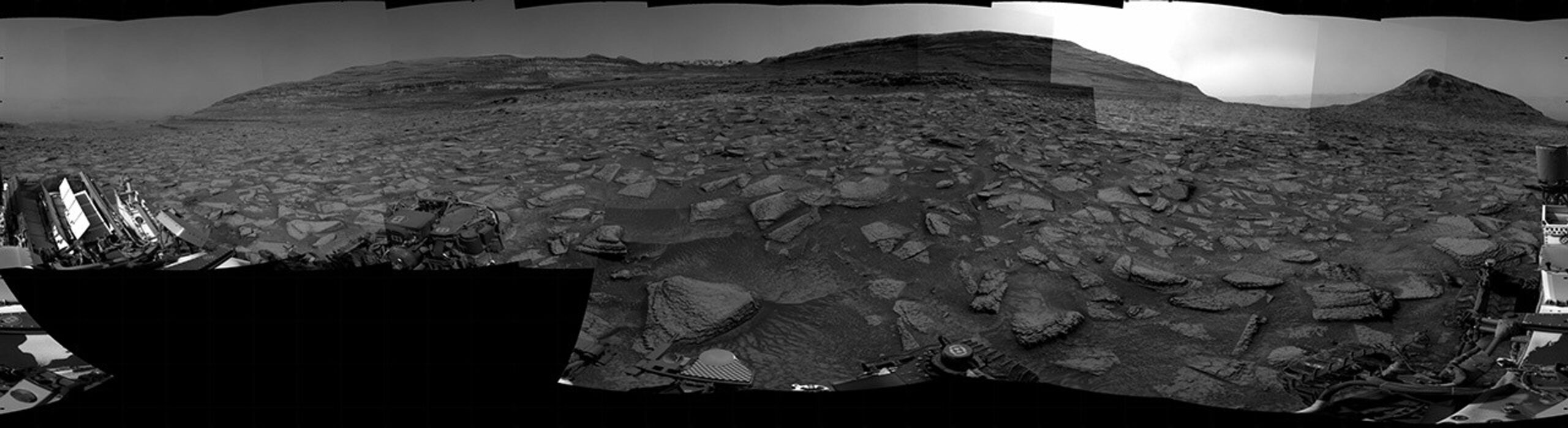
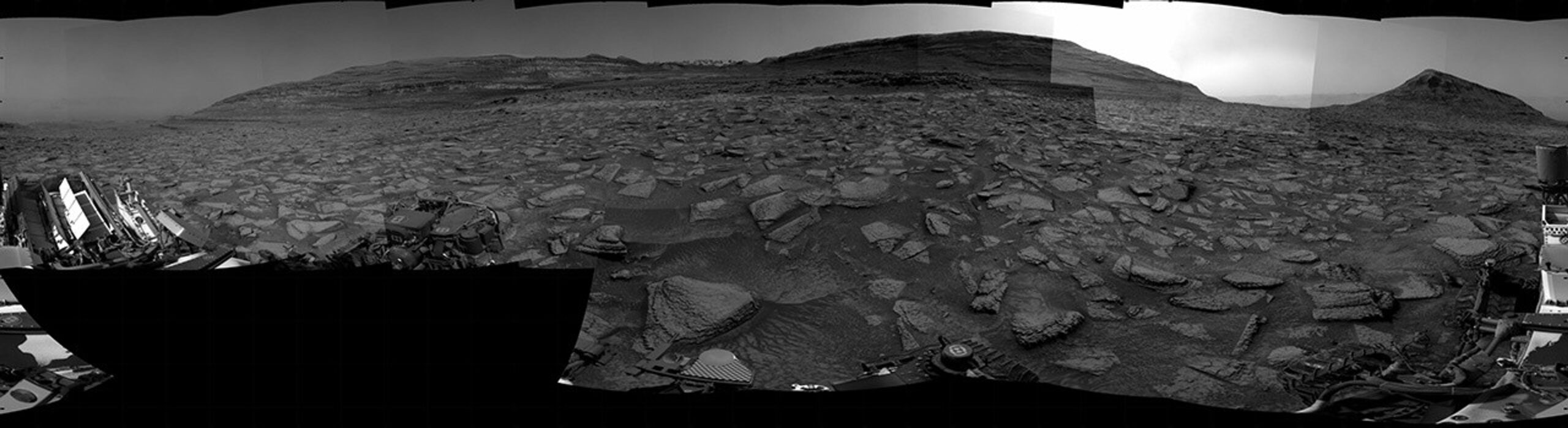
Marsovský rover Curiosity opäť ponúkol celistvý pohľad na okolie, tentoraz v podobe 360-stupňovej cylindrickej panorámy z Gale Crater. Mosaiku vytvorilo 33 záberov z mastom umiestnenej kamery Right Navigation Camera (Navcam), ktoré NASA/JPL-Caltech spojila do seam-corrected zobrazenia Martovho povrchu.
Snímka zobrazuje: Sol 4895: Right Navigation Camera, Cylindrical Projection.
Podľa zdroja Curiosity snímky získala 15. mája 2026, počas Sols 4895–4893 misie Mars Science Laboratory, pri drive 462 a na site number 122. Expozície prebiehali v lokálnom strednom slnečnom čase od 4 PM do 12 PM. Panoráma je centrovaná na 162 stupňoch azimutu, meranom v smere hodinových ručičiek od severu. Každý záber Navcam má zorné pole 45 stupňov.
Takéto panorámy nie sú len vizuálne atraktívne. Pre tím misie sú dôležité ako prehľad terénu, ktorý pomáha čítať geológiu okolia, plánovať ďalší pohyb roveru a porovnávať zmeny v prostredí. V tomto prípade zdroj uvádza samotnú kamerovú zostavu, rozsah záberov aj spôsob skladania obrazu; ďalšie interpretácie o konkrétnom teréne či nálezoch by už išli nad rámec zverejnených informácií.
Čo presne Curiosity zachytila
Navcam je navigačná kamera namontovaná na stĺpiku roveru a jej úlohou je poskytovať širší, praktický pohľad na okolie vozidla.
Snímka zobrazuje: A grayscale panorama of the Martian surface, possibly at night or in twilight, shows a wide field of flat, dark gray terrain dotted with multiple.
V tomto prípade vznikla z 33 obrazov panoráma, ktorú NASA popisuje ako 360-stupňovú cylindrickú projekciu. To znamená, že snímky boli zostavené do formy, ktorá čo najvernejšie ukazuje priestor okolo roveru v jednom súvislom páse obrazu.
Pre vedcov aj inžinierov je podstatné, že takáto mozaika zachytáva kontext. Jednotlivé snímky samy osebe ukazujú len časť scény, no po spojení do panorámy umožňujú lepšie vnímať vzdialenosti, prekážky a orientáciu v teréne.
Prečo je 360-stupňová panoráma dôležitá
V planetárnom prieskume má široký prehľad o okolí priamy praktický význam. Rover na Marse nepohybuje len pre fotografiu; každý presun sa plánuje opatrne a s dôrazom na bezpečnosť, energetiku a vedecké ciele. Panoramatické zábery pomáhajú rozhodovať, kadiaľ sa dá ísť, čo sa oplatí preskúmať a ktoré miesta môžu byť zaujímavé pre ďalšie merania.
Zároveň ide o dôležitú dokumentáciu misie. Takéto snímky tvoria vizuálny záznam prostredia v konkrétnom čase a na konkrétnom mieste. V širšom zmysle pomáhajú porovnávať jednotlivé etapy prieskumu a držať pohromade príbeh dlhodobej operácie na povrchu Marsu.
Ako funguje Navcam a cylindrická projekcia
Navcam je navrhnutá tak, aby poskytovala roveru orientačné informácie. Jej 45-stupňové zorné pole znamená, že zachytí pomerne široký výsek scény, ale na celistvý pohľad treba viac záberov z rôznych smerov. Z nich sa potom skladá mozaika, v ktorej sa prekrývajú okraje snímok a upravujú sa spoje, aby výsledok pôsobil čo najplynulejšie.
Cylindrická projekcia je bežný spôsob, ako zobraziť široké panorámy. V praxi ide o prevod sférického okolia do roviny tak, aby sa dal prehľadne zobraziť celý horizontálny okruh. Pre technické a vedecké použitie je to užitočný kompromis medzi vernosťou a čitateľnosťou obrazu.
Čo z týchto snímok môžu vedci odčítať
Aj bez detailného geologického popisu konkrétneho miesta majú podobné panorámy viacero vrstiev využitia. Vedci môžu z obrazu odhadovať členitosť povrchu, prítomnosť kameňov, svahov alebo prachových nánosov a sledovať, ako rover stojí voči okolitému terénu. V prípade Marťanských misií sa takýto prehľad často kombinuje s ďalšími dátami z iných prístrojov.
Všeobecne platí, že navigačné snímky neodpovedajú na všetky vedecké otázky samy osebe. Sú však dôležitou súčasťou rozhodovania, najmä keď treba spojiť bezpečnosť pohybu so zmysluplným výberom cieľov pre detailnejšie analýzy.
Čo zostáva otvorené a čo môže nasledovať
Zdroj neprináša podrobnosti o tom, čo Curiosity v tomto mieste konkrétne skúma ani aké vedecké závery z panorámy vyplývajú. To je pri takýchto zverejneniach bežné: najskôr sa zverejní obrazový kontext a až potom môžu nasledovať podrobnejšie interpretácie z ďalších meraní.
Z širšieho pohľadu je dôležité, že rover Curiosity stále aktívne zhromažďuje údaje po dlhodobej jazde na Marse. Každá takáto panoráma je malým, ale cenným kúskom do skladačky misie, ktorá spája navigáciu, dokumentáciu prostredia a vedecké plánovanie ďalších krokov.
Na poskytovanie tých najlepších skúseností používame technológie, ako sú súbory cookie na ukladanie a/alebo prístup k informáciám o zariadení. Súhlas s týmito technológiami nám umožní spracovávať údaje, ako je správanie pri prehliadaní alebo jedinečné ID na tejto stránke. Nesúhlas alebo odvolanie súhlasu môže nepriaznivo ovplyvniť určité vlastnosti a funkcie.
Funkčné
Vždy aktívny
Technické uloženie alebo prístup sú nevyhnutne potrebné na legitímny účel umožnenia použitia konkrétnej služby, ktorú si účastník alebo používateľ výslovne vyžiadal, alebo na jediný účel vykonania prenosu komunikácie cez elektronickú komunikačnú sieť.
Predvoľby
Technické uloženie alebo prístup je potrebný na legitímny účel ukladania preferencií, ktoré si účastník alebo používateľ nepožaduje.
Štatistiky
Technické úložisko alebo prístup, ktorý sa používa výlučne na štatistické účely.Technické úložisko alebo prístup, ktorý sa používa výlučne na anonymné štatistické účely. Bez predvolania, dobrovoľného plnenia zo strany vášho poskytovateľa internetových služieb alebo dodatočných záznamov od tretej strany, informácie uložené alebo získané len na tento účel sa zvyčajne nedajú použiť na vašu identifikáciu.
Marketing
Technické úložisko alebo prístup sú potrebné na vytvorenie používateľských profilov na odosielanie reklamy alebo sledovanie používateľa na webovej stránke alebo na viacerých webových stránkach na podobné marketingové účely.